
Field tests on installation performance of a new hybrid dynamically installed anchor
-
摘要: 动力锚是近年来海洋工程领域发展的一种锚固基础,依靠自身重力势能贯入海床土中,用来锚固浮式结构。本研究针对一种自主研制的新型组合动力锚(板形锚+助推器),在已有室内模型试验和数值模拟的基础上,开展现场大比尺试验(海试)来验证考虑真实环境荷载作用下锚的安装性能,并分别探究了板形锚形状、助推器重量以及组合锚在水中的释放高度对最终沉贯深度的影响。试验结果表明:在风浪流等环境荷载作用下,组合动力锚仍然能成功贯入海床土中,安装结束后锚轴线相对铅垂方向的偏角在8°以内。根据海上试验结果建立了基于锚的总能量的沉贯深度预测方法,可快速预测锚在海床中的最终沉贯深度,以指导工程设计和施工。Abstract: The dynamically installed anchor (DIA) is a newly developed anchoring foundation applied to ocean engineering, which is installed through gravitational energy and used to secure floating structures. On the basis of the existing laboratory investigation and numerical simulation results, the present study aims to investigate the installation performance of a self-developed hybrid DIA (comprising a plate-shaped anchor and a booster) by performing large-scale field tests (sea trials) with the actual environmental loads taken into consideration. In field tests, the effects of the shape of the plate-shaped anchor, the booster weight, and the release height on the final penetration depth of the hybrid DIA within the seabed are investigated. The results indicate that the present hybrid DIA can successfully penetrate into the seabed, which is largely unaffected by environmental loads including wind, wave and current. After installation, the tilt angle from the central axis of the hybrid DIA to the vertical direction is less than 8°. Moreover, a prediction model based on the total energy of the hybrid DIA is proposed to quickly estimate the final penetration depth of the hybrid DIA, which may provide references for engineering design.
-
Keywords:
- dynamically installed anchor /
- field test /
- penetration depth /
- seabed sediment /
- environmental load /
- sea trial
-
0. 引言
海洋资源和空间开发需要用到多种浮式结构,例如浮式油气开采平台、浮式风电机机组平台以及浮式养殖网箱。浮式结构通过锚链/缆绳与锚固基础相连。锚固基础坐底于海床表面或嵌入海床中,用来锚定浮式结构。动力锚是近年发展起来的一种新型锚固基础,依靠自身重力势能在海水中自由下落并高速贯入海床中,具有安装效率高、成本低的特点[1-2]。目前,两种动力锚——鱼雷形的鱼雷锚和板形的多向受荷锚(OMNI-Max anchor)[3-4],已成功应用于海洋工程中。板形锚,也称锚板,通过吸力式沉箱贯入[5]或船舶拖曳[6]等方式安装到指定深度,锚板的承载效率较高[7-8]但安装耗时长、成本高。文献[9]提出了一种新型组合动力安装锚,简称组合锚(见图1),由板形锚和助推器两部分组成,结合了动力锚快速安装和板形锚高效承载的特点。组合锚的安装过程包括4个阶段:阶段1,组合锚从距离海床表面预定高度(30~75 m)处释放,在海水中加速下落;阶段2,组合锚从海床表面以高初速度(20~30 m/s)贯入海床土中,完成动力安装;阶段3,绞拉助推器尾部的回收绳,将助推器回收至安装船,板形锚留在海床中;阶段4,张紧连接在锚眼处的锚链/缆绳,使板形锚在海床中旋转并调节至合适方位,以提供足够的抗拔承载力。
如图2(a)所示,板形锚主要由翼板、锚柄和背鳍3部分组成,其中翼板包含三角形和盾形两种形式。三角形锚在贯入海床时受到的土体阻力较小,适用于土强度较高的海床;盾形锚具有较高的承载面积,适用于软黏土海床以提供更高的法向抗拔承载力。翼板厚度从轴线至边缘逐渐减小,且翼板边缘进行圆弧化打磨处理,以降低拖曳阻力系数进而提高组合锚在水中的下落速度。锚柄使锚眼位置偏离翼板平面,便于实现板形锚在锚链/缆绳作用下的旋转调节从而提高承载力[9-11]。助推器用于辅助板形锚的安装,一方面可有效增加组合锚的总重量从而增加板形锚在海床中的沉贯深度,另一方面可显著提高组合锚在海水中自由下落时的方向稳定性从而提高安装成功率[12-14]。助推器主要由中轴和尾翼两部分组成,中轴用来增加组合锚的总重量,尾翼用来确保组合锚在海水中下落时的垂直度。助推器和板形锚通过剪切销[12]连接在一起形成组合锚,在助推器回收时剪切销被破坏,从而将板形锚留置在海床土中。
![]() 图 2 组合锚和带助推器的球形触探仪Figure 2. Hybrid anchor and free-fall ball penetrometer with a booster
图 2 组合锚和带助推器的球形触探仪Figure 2. Hybrid anchor and free-fall ball penetrometer with a booster笔者已开展小比尺模型试验(比尺
λ = 41)研究了组合锚在竖直水槽中的自由下落过程[15-16]。结果表明,当助推器尾翼宽度等于板形锚翼板宽度时,三角形组合锚和盾形组合锚的拖曳阻力系数分别为0.59和0.62;且组合锚在水中具有良好的方向稳定性。笔者进一步基于小比尺模型试验(λ = 41)和大变形数值模拟探究了组合锚在黏土和砂土海床中的高速沉贯特性[17-19],探究了贯入初速度(锚尖接触海床表面瞬间的速度)、助推器质量、土强度及其演化特性、板形锚形状等因素对组合锚最终沉贯深度的影响规律,建立了基于总能量的最终沉贯深度理论预测模型。此外,作者基于塑性分析方法研究了旋转调节过程中板形锚–锚链–海床土相互作用,结果表明在适当条件下板形锚具有下潜性能[9],即板形锚在锚链/缆绳调节作用下能嵌入更深、强度更高的海床土中,从而提高超设计荷载情况下浮式结构的安全性。本研究在上述研究的基础上,从室内试验拓展至海上试验,开展现场大比尺试验来研究组合锚从海水到海床中的高速安装过程,检验组合锚在真实风浪流等环境荷载作用以及真实海洋地质条件下的安装性能,分析板形锚形状、助推器质量及组合锚在水中的释放高度等要素对最终沉贯深度的影响规律,从而建立并验证了组合锚沉贯深度理论预测方法。
1. 试验准备
1.1 试验场地简介
海试在中国黄海某海域进行,最大水深为19.5~20.0 m。当风速小于10 m/s时认为环境条件良好,可以开展海试,试验期间潮差约为2.8 m。海床浅层为软黏土,不排水抗剪强度随深度线性增加,这部分内容将在2.3节详细介绍。
1.2 模型锚及相似关系
现场试验采用模型锚如图2(a)所示,比尺
λ = 7.5。模型锚的主要尺寸示于图2(a)并列于表1。三角形锚和盾形锚的翼板宽度wa = 533.3 mm,助推器尾翼宽度wf = 450 mm,即三片尾翼所形成外接圆直径与翼板宽度之比为1.80,确保组合锚在水中自由下落时的方向稳定性[13]。助推器中轴长度可以调整,以实现不同组合形式。表 1 组合锚主要尺寸Table 1. Primary dimensions of hybrid anchor部件名称 物理量 模型/mm 原型/m 翼板 高度ha 666.7 5.00 宽度wa 533.3 4.00 翼板轴线处的厚度tfi 34.7 0.26 翼板边缘处的厚度tfo 10.7 0.08 盾形锚翼板直边高度hfu 333.5 2.50 锚柄 高度hs 100.0 0.75 锚眼至翼板轴线的距离en 217.0 1.63 背鳍 高度hfb 300.0 2.25 宽度wfb 200.0 1.50 助推器尾翼 高度hf 200.0 1.50 宽度wf 450.0 3.38 助推器中轴 直径Dbooster 120.0 0.90 高度hb 变化值 变化值 Han等[20]详细推导了常规重力场(即1g,g为重力加速度)条件下动力锚高速沉贯模型试验相似关系。关键物理量的比尺汇总如下:速度比尺为
λ0.5 ,加速度比尺为λ−0.5 ,时间比尺为λ ,能量比尺为λ4 ,土强度比尺为λ 。需要说明的是,对于强度线性增加的软黏土海床,不排水抗剪强度su可表示为su = sum + kz(sum为表层土不排水抗剪强度;k为强度梯度,表示深度每增加1 m对应的强度提高量;z为埋深),sum和k的比尺分别为λ 和1。由上述相似关系推导,沉贯深度的比尺为λ 。1.3 海床土强度测试方法
现场试验中基于带助推器的自由落体式球形触探仪(free-fall ball penetrometer, FFB)来测量海床土的不排水抗剪强度。FFB的结构见图2(b),下部为一球体(直径Dball=140 mm),上部为一助推器(直径Dbooster = 140 mm,长hb = 2.19 m),二者通过一长hs = 280 mm、直径Ds = 44 mm的连接杆相连。连接杆可避免助推器的存在对球周围土体流动机制的影响。基于FFB测量海床土强度的具体方法参考文献[21]。
1.4 试验步骤
搭载“华东院3号”自升式勘察平台开展组合锚动力安装过程海试,通过甲板面上的吊机和绞车协同操作,实现组合锚的安装和回收,试验过程如图3所示。具体步骤如下:
(1)将板形锚和助推器组装完毕后,用吊机将组合锚从平台甲板起吊并移至甲板以外的海面上方,缓慢释放吊机的钢索使组合锚没入海水中直至达到预定释放高度he(指组合锚在海水中的下落高度)。
(2)静置直至组合锚在海水中的晃动趋于稳定,开启自动脱钩,组合锚在海水中自由下落并高速贯入海床土中,在此过程中用密封在组合锚尾翼上的基于微机电原理(micro-electromechanical systems, MEMS)的三轴加速度传感器(型号ADXL326,量程±16g,精度0.015g)来测量组合锚在海水中加速下落过程以及在海床中高速沉贯过程的加速度。
(3)安装结束后,用绞车将组合锚拔出海床并回收至平台甲板。
由于组合锚动力安装试验需要平台上的吊机和绞车辅助,试验只能在吊机有效工作范围内进行。为避免贯入坑对后续试验的影响,在同一场地可进行3个试验,试验前进行一次FFB自由下落试验来测试海床土的不排水抗剪强度。
2. 试验工况及试验结果
2.1 试验工况
海上试验在3个相近场地开展,共包含3个FFB自由下落试验和7个组合锚动力安装试验。一个场地的所有试验结束后,平台在海流作用下漂浮10 min并固定,在此进行下一组试验。
组合锚动力安装试验的7个工况及结果列于表2。工况名称记为HX-nB,其中‘H’表示‘组合锚’;‘X’为‘T’或‘P’,分别表示‘三角形锚’和‘盾形锚’;‘n’为表征助推器质量mb和板形锚质量ma的比值,数字n越大表示助推器质量越大;‘B’代表‘助推器’。
表 2 组合锚动力安装海上试验工况及结果Table 2. Field test cases and results of dynamic installation of hybrid anchors工况 工况名称 mt/kg ma /kg mb/kg mb/ma ha /m ht& /m he/m vi/(m·s-1) ze /m ze/ha δt/(°) 场地 1 HT-2B 133.31 41.80 91.51 2.19 0.67 1.62 3.83 6.49 1.73 2.58 4.23 1 2 HT-3B 174.39 41.80 132.59 3.17 0.67 2.18 6.39 7.92 3.07 4.58 —# 1 3 HT-3B 174.39 41.80 132.59 3.17 0.67 2.18 9.94 9.40 3.15 4.70 3.05 2 4 HP-2B 195.87 63.28 132.59 2.10 0.67 2.18 9.79 9.29 2.98 4.45 7.72 2 5 HP-2B 195.87 63.28 132.59 2.10 0.67 2.18 14.58 9.65 2.99 4.46 6.79 2 6 HP-4B 301.75 63.28 238.47 3.77 0.67 3.45 ≈ 10* 10.74 4.52 6.75 5.21 3 7 HP-4B 301.75 63.28 238.47 3.77 0.67 3.45 10.79 10.66 4.44 6.63 5.83 3 注: &ht指组合锚的总长度;# MEMS加速度传感器水平轴出故障,未采集到准确数据;* MEMS加速度传感器未采集到锚在水中下落初始段(大约下落高度2 m)的数据。从表2所列出的试验结果中可以得到以下发现:
(1)以工况2和工况3为例,对比结果显示,组合锚在水中的释放高度he越大,贯入速度vi越大,从而对应更深的最终沉贯深度ze(安装结束后锚尖至海床表面的距离)。
(2)工况3和工况4对应的组合锚分别为HT-3B和HP-2B,二者用到相同的助推器,但前者的最终沉贯深度要更大一些。工况3中所用三角形锚相对工况4中盾形锚质量更小,但三角形锚的表面积比盾形锚少40%左右,这有助于减小作用在三角形锚上的土体阻力从而在一定程度上增加组合锚的最终沉贯深度。
(3)安装结束后根据三轴加速度传感器的输出加速度可计算组合锚轴线相对铅垂方向的夹角δt。安装结束后工况4中组合锚HP-2B偏角δt最大,为7.72°。Han等[20]开展了多向受荷锚倾斜贯入海床过程模型试验,结果表明,当锚轴线相对铅垂方向的夹角不超过15°时,锚的最终沉贯深度基本上不受倾斜角度的影响。本研究试验结果表明:在真实海洋环境的风浪流作用下,组合锚仍能比较垂直地在海水中下落并成功贯入海床中,说明组合锚具有良好的方向稳定性。
2.2 典型试验结果分析
图4(a)为工况4和工况5中组合锚HP-2B在动力安装过程中加速度随运动距离的变化关系,横轴为加速度a,a> 0表示加速度向下,说明作用在锚上的阻力小于锚在水中的有效重量;纵轴为锚尖相对海床表面的距离z,由MEMS加速度传感器积分确定,z> 0表示锚尖在海床土中,反之则表示锚尖在海水中。组合锚在水中自由下落的运动方程如下所示:
![]() 图 4 组合锚动力安装过程加速度及速度变化规律Figure 4. Variation of acceleration and velocity of hybrid anchors during dynamic installation
图 4 组合锚动力安装过程加速度及速度变化规律Figure 4. Variation of acceleration and velocity of hybrid anchors during dynamic installation(mt+m*)a=W′t+W′c−FDa−FDc, (1) 式中,mt为组合锚总质量,m*为附加质量,Wtʹ为组合锚在水中的有效重量,Wcʹ为回收绳和MEMS加速度传感器的导线在海水中的有效重量,FDa为组合锚在水中自由下落时所受的拖曳阻力,FDc为回收绳和导线所受的拖曳阻力。回收绳为高聚乙烯缆绳(直径=14 mm),密度为970 kg/m3。导线的直径为8 mm,密度为1500 kg/m3。回收绳和导线的加权密度与海水接近,因此,式(1)中Wcʹ近似为零。组合锚在海水中拖曳阻力的计算如下所示:
FDa=12CDaρwAtv2, (2) 式中,CDa为组合锚在水中的拖曳阻力系数,ρw为海水密度,At为组合锚在垂直于轴线平面内的投影面积。回收绳和导线均为细长形结构,长度方向的尺寸远大于直径,在海水中所受拖曳阻力如下所示:
FDc=12CDcρwAeffv2, (3) 式中,CDc为回收绳和导线在海水中的拖曳阻力系数,Aeff为回收绳和导线等效面积。Liu等[13]通过模型试验建议锚绳的拖曳阻力系数CDc= 0.01,等效面积为随锚一起运动的回收绳和导线的表面积(即等效面积随着锚运动距离的增加而线性增加)。
图4(b)为组合锚速度v随运动距离z的变化关系。当组合锚从静止状态被释放后,速度从零开始逐渐增加,初始加速度约为a = 8.3 m/s2,小于重力加速度g,这是由锚在水中所受浮力引起的。随着速度的不断增加,作用在组合锚、回收绳和导线上的拖曳阻力也随之增加,因此加速度逐渐减小。工况4和工况5对应的释放高度分别为he =9.79和14.58 m。当组合锚下落至海床表面时,工况5中组合锚的加速度已减小至零,表明组合锚已经达到最大下落速度vmax。然而,工况4中组合锚对应的加速度仍大于零,表示组合锚仍在加速而尚未达到最大下落速度vmax。从图4(b)也可以看出,工况5中组合锚贯入海床后由于受到土体阻力,运动速度立刻开始减小;而工况4中组合锚的运动速度继续增加,直到作用在锚上的阻力超过锚在水中的有效重量后,锚才开始做减速运动。图4(b)中所示工况4和工况5中组合锚的贯入速度分别为vi = 9.29和9.65 m/s,二者比较接近,因此对应的最终沉贯深度也基本一致,这也说明海试结果具有可重复性。另一方面也表明,过高的释放高度对动力锚的安装深度提高有限,甚至相反。若组合锚达到极限速度后仍在水中运动,则随组合锚一起运动的锚链/缆绳长度进一步增加,导致作用在锚链/缆绳上的拖曳阻力继续增加,这反而会减小组合锚的运动速度[13]。因此,动力锚的释放高度应合理设计。
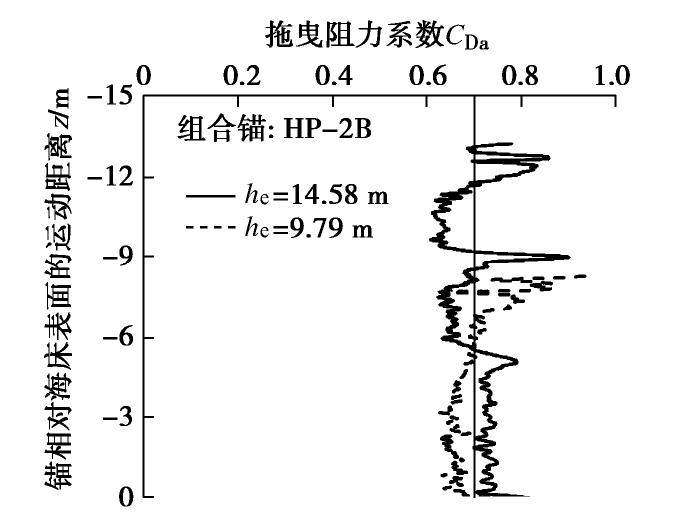
图5所示为由式(1)计算得到的组合锚HP-2B的拖曳阻力系数CDa。对于多向受荷锚,附加质量m*很小可以忽略[13],本文也认为m*= 0。在组合锚初始下落阶段,拖曳阻力系数随运动距离的增加而略有减小,此时锚的下落速度较小,因此,计算得到的拖曳阻力系数也存在较大偏差。随着下落距离的增加拖曳阻力系数逐渐趋于稳定,为0.7左右。小比尺模型试验结果[16]表明,组合锚的拖曳阻力系数约为0.62,与本研究所得结果相比稍微偏低。此偏差的原因可能海上试验的板形锚上安装有三角形背鳍,而室内小比尺试验中模型锚上无背鳍。背鳍的存在使板形锚结构更加复杂,因而拖曳阻力系数略有增加。
2.3 FFB反演海床土不排水抗剪强度
在球形触探仪内部安装一MEMS加速度传感器来测量FFB在水中及海床中的运动过程。另外,在球形触探仪和连接杆之间还设置一力传感器(型号KM16z,量程± 50 kN)来测量助推器和球形触探仪之间的相互作用力Fin。以球形触探仪为研究对象,其在海床中的运动微分方程如下所示:
(mball+mball*)a=W′ball+Fin−FN−FDs−Fb , (4) 式中,mball为球形触探仪的质量,mball*为附加质量,Wballʹ为球形触探仪在水中的有效重量,FN为端承阻力,FDs为土体的拖曳阻力,Fb为土体浮力。图6为FFB第二次贯入试验(场地-2)加速度、速度和助推器与球形触探仪之间的相互作用力(简称助推器推力)随贯入深度的变化关系,纵坐标zʹ表示球形触探仪底部相对海床表面的埋深。当zʹ< 0.42 m时,只有球形触探仪没入海床土中而助推器尚未接触海床,此时FFB的加速度仍为正值。待助推器贯入海床后,作用在助推器上的土体阻力随着贯入深度的增加而不断增加,导致FFB的加速度从正值变为负值,即FFB开始做减速运动。图6(b)所示FFB速度随贯入深度的变化关系与组合锚的相似,这里不再赘述。图6(c)中横坐标为助推器推力,若Fin> 0表示助推器和球形触探仪之间的相互作用力为压力。助推器推力随FFB贯入深度的增加而增加,这说明助推器可促使FFB贯入更深的海床土中,从而可预测埋深较大的海床土的不排水抗剪强度。
![]() 图 6 FFB贯入海床过程所采集到的数据Figure 6. Recorded data of FFB during dynamic penetration within seabed
图 6 FFB贯入海床过程所采集到的数据Figure 6. Recorded data of FFB during dynamic penetration within seabed式(4)中,附加质量mball*如下所示:
mball*=CaddρsVdis, (5) 式中,Cadd为附加质量系数,一般取为0.5,ρs为土体密度,对于本次海上试验场区的海床土,取为1600 kg/m3,Vdis为球形触探仪排开土体的体积。
端承阻力FN如下所示:
FN=NballApsu, (6) 式中,Nball为承载力系数,Ap为球形触探仪的投影面积,su为土体表观不排水抗剪强度,同时包含了土体率效应和软化效应。承载力系数Nball随球–土界面摩擦系数α的增加而增加[22]。文献[21]基于大变形数值模拟方法建立了球形触探仪周围土体达到完全回流机制时承载力系数随摩擦系数的变化关系,即Nball = 10.38 + 3.99α。球表面的粗糙程度可认为介于光滑和粗糙之间,若假设α = 0.4,则对应的Nball = 12。由一维固结试验得到海床土在100 kPa竖向应力下的固结系数cv = 1.37 mm2/s。Finnie等[23]指出,当无量纲速度V(V= vDball/cv)> 30时,土体处于不排水状态。对于FFB来说,只要运动速度v>0.3 mm/s,即可确保FFB周围土体处于不排水状态。
拖曳阻力FDs如下所示:
FDs=12CDsρsApv2, (7) 式中,CDs为球形触探仪在海床土中运动时对应的拖曳阻力系数。CDs与摩擦系数
α 和非牛顿雷诺数Ren 有关[21],如下所示:CDs=−0.054+0.978α−0.403α2Ren0.115+0.875α−0.500α2, (8) 下式则为非牛顿雷诺数
Ren 的定义。Ren=ρsv2su。 (9) 联立式(4)~(9),海床土的表观不排水抗剪强度如下所示:
su=W′ball+Fin−FDs−Fb−(mball+mball*)aNballAp。 (10) 图7为根据FFB测量数据计算得到的3个试验场地的表观不排水抗剪强度su随球形触探仪埋深z的关系。需要指出的是,埋深z表示的是球形触探仪最大直径位置相对海床表面的深度。从图7中可以看出,表观不排水抗剪强度随埋深近似线性增加,可表示为su = 1+2.6z kPa。
3. 试验结果讨论与分析
3.1 组合锚最终沉贯深度预测模型
组合锚在海水中自由下落时运动速度随下落距离的变化关系可基于式(1)来预测,已知组合锚的拖曳阻力系数,由式(1)积分就可以得到组合锚在水中的运动速度,从而确定贯入速度vi。组合锚在海床中的最终沉贯深度ze与板形锚形状、助推器质量、土强度、贯入速度等因素有关。孙兴伟[17]提出了基于总能量的组合锚最终沉贯深度预测公式,如下所示:
ze/Deff=a[Etotal/(keAsDeff2)]b, (11) 式中,Deff为板形锚的等效直径,定义为与板形锚在垂直于轴线平面内的投影面积相等的圆的直径,Etotal为组合锚的总能量,包含组合锚下落至海床表面的动能和相对最终沉贯深度位置的势能,ke[= (2sum+kze)/ze]为等效强度梯度,As为板形锚的表面积,a,b为与板形锚形状有关的系数。文献[17]用高岭土模拟海床软黏土,基于室内小比尺(λ = 41)模型试验研究了三角形组合锚和盾形组合锚在海床中的高速沉贯过程,试验结果如图8所示。对于三角形组合锚,当a= 2.156,b = 0.363时,基于式(11)的拟合结果与试验结果一致;而对于盾形组合锚,a= 1.751,b = 0.424。
![]() 图 8 组合锚最终沉贯深度与无量纲总能量之间的关系Figure 8. Relationship between final penetration depth of hybrid anchors and dimensionless total energy
图 8 组合锚最终沉贯深度与无量纲总能量之间的关系Figure 8. Relationship between final penetration depth of hybrid anchors and dimensionless total energy图8(a)和图8(b)中也包含了现场试验的结果,可以发现,当无量纲化的总能量Etotal/(keAsDeff2)相同时,现场试验对应的无量纲化的沉贯深度ze/Deff与室内模型试验结果相比偏大,这可能是由于以下原因引起的:①翼板形状不同;②不排水抗剪强度的解译方法不同;③比尺效应导致率效应不同。室内模型试验用到的板形锚翼板是等厚度的;而海试所用的板形锚翼板厚度从轴线向边缘逐渐缩小,且翼板边缘进行了圆弧化打磨处理。Han等[15]的试验结果表明:采用变厚度翼板且翼板边缘进行圆弧化打磨处理后,盾形锚在水中自由下落时的拖曳阻力系数由1.02降低至0.55。此外,翼板边缘圆弧化处理也有助于减小作用在翼板前端的端承阻力。因此,海试所用的板形锚在海床中所受拖曳阻力和端承阻力较低,从而有助于提高沉贯深度。对于现场试验,预测公式(式(11))中所用su为海床土表观不排水抗剪强度,由FFB测量数据分析得到。对室内小比尺模型试验,预测公式中所用su基于静力T-bar触探试验测得,T-bar触探仪直径为8 mm,贯入速度为1 mm/s,对应的剪应变率为0.125 s-1,比FFB试验时土体的剪应变率低2个量级。所以,在无量纲化的总能量Etotal/(keAsDeff2)中,基于T-bar触探试验得到等效强度梯度ke未体现出土体在高剪应变率下的率效应特性,导致无量纲化的能量Etotal/(keAsDeff2)偏大。由1.2小节相似关系可得,模型试验的剪应变率
˙γ 是原型的λ0.5倍,这意味着模型试验高估了率效应,从而得到的沉贯深度是偏于保守的。模型比尺越小,率效应越显著,对应的沉贯深度也越浅。3.2 不同类型动力锚承载性能比较
表3对比了鱼雷锚、多向受荷锚和组合锚HP-2B的承载性能。Medeiros[3]通过现场试验研究了鱼雷锚在黏土海床中的高速沉贯过程和抗拔承载力。鱼雷锚长ha=12 m,质量ma=62 t,在正常固结软黏土su=5+2z kPa的海床中最终沉贯深度达ze= 29 m。锚眼位于锚体的最上端,当锚眼处上拔荷载方向与水平方向的夹角为45°时,极限抗拔承载力Fult= 1.9~2.1 MN。极限抗拔承载力与锚的干重量Wa之比Fult/Wa称为承载效率。鱼雷锚的抗拔承载力主要由锚的自重和锚体侧壁的摩擦阻力来提供,因而承载效率较低,Fult/Wa = 3.0~3.4。Zimmerman等[4]通过现场足尺试验研究了多向受荷锚在正常固结软黏土(su = 2.4+1.1z kPa)中的高速安装过程,锚长ha = 9.15 m,质量ma= 39 t,在水中下落30 m后能达到vi = 19 m/s的贯入速度,对应的最终沉贯深度ze = 10.6~20.2 m。Zimmerman等[4]还基于理论分析方法预测了多向受荷锚的极限抗拔承载力,Fult= 2.1~3.8 MN。多向受荷锚主要由三片翼板构成,具有较高的法向承载面积,因而与鱼雷锚相比具有较高的承载效率,Fult/Wa=5.4~9.7。本研究以组合锚HP-2B和工况4为例,待动力安装结束后需要张紧连接在锚眼位置的锚链/缆绳对盾形锚进行旋转调节,这会显著增加翼板在垂直于锚眼处上拔荷载方向平面内的投影面积,使作用在锚上的土体阻力主要为法向阻力,锚的极限承载力高达Fult= 10.7 MN。此外,盾形锚与鱼雷锚和多向受荷锚相比重量更轻,且沉贯深度更大(对应的土强度也更大),这会进一步提高锚的承载效率,Fult/Wa =30.8。
表 3 不同类型动力锚承载能力对比Table 3. Comparison of holding capacity of different types of dynamically installed anchors表3中的鱼雷锚和组合锚HP-2B对比可发现,虽然组合锚HP-2B中的盾形锚质量仅为鱼雷锚的一半,但抗拔承载力约为后者的4倍。这意味着锚固同一个浮式结构,在不考虑锚链/缆绳受到土体阻力的前提下,盾形锚的安装个数仅为鱼雷锚的1/4,可显著节约安装时间、降低安装成本。
4. 结论
本研究针对一种新型组合动力安装锚,开展海试来验证组合锚在真实环境荷载作用下的安装性能,探究了板形锚形状、助推器质量及释放高度对最终沉贯深度的影响规律。主要结论如下。
(1)组合锚在真实环境荷载的风浪流作用下仍能成功贯入海床土中,动力安装结束后组合锚轴线相对铅垂方向的倾斜角度在8°之内。
(2)基于FFB测量数据计算得到的表观不排水抗剪强度同时包含了率效应和软化效应,可用于基于总能量的理论公式中用来预测组合锚在海床中的最终沉贯深度。
(3)与鱼雷锚和多向受荷锚相比,本研究组合锚中的板形锚重量更轻并且承载效率更高,这既能节约锚的材料成本,又能减少一个浮式结构所需锚的数量,从而提高安装效率、降低安装成本。
附录A:
图1所示组合锚安装的最后一个阶段为旋转调节过程,由于锚眼偏离翼板平面,在上拔荷载作用下板形锚会同时发生平动和转动。这里考虑板形锚在竖直上拔荷载作用下的极端工况,如图A1所示。旋转调节前,翼板中心的埋深为zc,不断增加竖直上拔荷载,板形锚在旋转的同时向上运动,出现埋深损失。翼板形心的埋深损失记为Δzcʹ。
![]() A1 竖直上拔荷载作用下板形锚旋转调节过程示意图A1. Sketch showing keying process of plate-shaped anchor subjected to vertical loading
A1 竖直上拔荷载作用下板形锚旋转调节过程示意图A1. Sketch showing keying process of plate-shaped anchor subjected to vertical loadingTian等[24]基于大变形有限元方法模拟了吸力式安装板锚(suction embedded plate anchor, SEPLA)在竖直上拔荷载作用下的旋转调节过程,埋深损失与锚眼相对翼板的位置有关。当翼板从竖直平面旋转至水平面内时,翼板形心的埋深损失为0.17~0.64倍的锚宽。本文计算中假设Δzcʹ = 0.4ha,ze-zc = 0.6ha。以表3中组合锚HP-2B为例,当盾形锚的翼板从竖直平面旋转至水平面内时,zcʹ= 17.35 m,该深度处土体表观不排水抗剪强度su= 46 kPa。极限抗拔承载力Fult由式(A1)来计算:
Fult=NsuAfluke, (A1) 式中,N为承载力系数,Afluke为翼板的最大投影面积,对于原型盾形锚,Afluke= 17.8 m2。Tong等[9]由小变形有限元方法计算得到盾形锚的法向承载力系数为12.74,本研究计算中取N=10。根据上述分析,由式(A1)计算得到盾形锚的极限抗拔承载力Fult = 8.2 MN。
致谢:: 感谢徐明、王振红、郑贞明在试验前期的有益讨论和海上试验过程中的大力协助;同时感谢叶尖峰、李云飞、郭新帅和李艳忠在试验前期测试中的协助。 -
![]()
图 2 组合锚和带助推器的球形触探仪
Figure 2. Hybrid anchor and free-fall ball penetrometer with a booster
![]()
图 4 组合锚动力安装过程加速度及速度变化规律
Figure 4. Variation of acceleration and velocity of hybrid anchors during dynamic installation
![]()
图 6 FFB贯入海床过程所采集到的数据
Figure 6. Recorded data of FFB during dynamic penetration within seabed
![]()
图 8 组合锚最终沉贯深度与无量纲总能量之间的关系
Figure 8. Relationship between final penetration depth of hybrid anchors and dimensionless total energy
![]()
A1 竖直上拔荷载作用下板形锚旋转调节过程示意图
A1. Sketch showing keying process of plate-shaped anchor subjected to vertical loading
表 1 组合锚主要尺寸
Table 1 Primary dimensions of hybrid anchor
部件名称 物理量 模型/mm 原型/m 翼板 高度ha 666.7 5.00 宽度wa 533.3 4.00 翼板轴线处的厚度tfi 34.7 0.26 翼板边缘处的厚度tfo 10.7 0.08 盾形锚翼板直边高度hfu 333.5 2.50 锚柄 高度hs 100.0 0.75 锚眼至翼板轴线的距离en 217.0 1.63 背鳍 高度hfb 300.0 2.25 宽度wfb 200.0 1.50 助推器尾翼 高度hf 200.0 1.50 宽度wf 450.0 3.38 助推器中轴 直径Dbooster 120.0 0.90 高度hb 变化值 变化值  下载: 导出CSV
下载: 导出CSV
表 2 组合锚动力安装海上试验工况及结果
Table 2 Field test cases and results of dynamic installation of hybrid anchors
工况 工况名称 mt/kg ma /kg mb/kg mb/ma ha /m ht& /m he/m vi/(m·s-1) ze /m ze/ha δt/(°) 场地 1 HT-2B 133.31 41.80 91.51 2.19 0.67 1.62 3.83 6.49 1.73 2.58 4.23 1 2 HT-3B 174.39 41.80 132.59 3.17 0.67 2.18 6.39 7.92 3.07 4.58 —# 1 3 HT-3B 174.39 41.80 132.59 3.17 0.67 2.18 9.94 9.40 3.15 4.70 3.05 2 4 HP-2B 195.87 63.28 132.59 2.10 0.67 2.18 9.79 9.29 2.98 4.45 7.72 2 5 HP-2B 195.87 63.28 132.59 2.10 0.67 2.18 14.58 9.65 2.99 4.46 6.79 2 6 HP-4B 301.75 63.28 238.47 3.77 0.67 3.45 ≈ 10* 10.74 4.52 6.75 5.21 3 7 HP-4B 301.75 63.28 238.47 3.77 0.67 3.45 10.79 10.66 4.44 6.63 5.83 3 注: &ht指组合锚的总长度;# MEMS加速度传感器水平轴出故障,未采集到准确数据;* MEMS加速度传感器未采集到锚在水中下落初始段(大约下落高度2 m)的数据。
下载: 导出CSV
表 3 不同类型动力锚承载能力对比
Table 3 Comparison of holding capacity of different types of dynamically installed anchors
下载: 导出CSV
-
[1] 国振, 王立忠, 李玲玲. 新型深水系泊基础研究进展[J]. 岩土力学, 2011, 32(增刊2): 469-477. doi: 10.16285/j.rsm.2011.s2.060 GUO Zhen, WANG Li-zhong, LI Ling-ling. Recent advances in research of new deepwater anchor foundations[J]. Rock and Soil Mechanics, 2011, 32(S2): 469-477. (in Chinese) doi: 10.16285/j.rsm.2011.s2.060
[2] 刘君, 韩聪聪. 新型锚固基础——动力锚[M]. 北京: 科学出版社, 2019. LIU Jun, HAN Cong-cong. Dynamically Installed Anchor: A New Anchoring Solution in Offshore Engineering[M]. Beijing: Science Press, 2019. (in Chinese)
[3] MEDEIROS C J. Low cost anchor system for flexible risers in deep waters[C]//Offshore Technology Conference, 2009, Texas.
[4] ZIMMERMAN E H, SMITH M, SHELTON J T. (2009). Efficient gravity installed plate anchors for deepwater mooring[C]//Offshore Technology Conference, 2009, Texas.
[5] LIU Jun, LU Li-hui, YU Long. Keying behavior of suction embedded plate anchors with flap in clay[J]. Ocean Engineering, 2017, 131: 231-243. doi: 10.1016/j.oceaneng.2017.01.008
[6] WANG L Z, SHEN K M, LI L L, et al. Integrated analysis of drag embedment anchor installation[J]. Ocean Engineering, 2014, 88: 149-163. doi: 10.1016/j.oceaneng.2014.06.028
[7] 黄茂松, 余生兵. 基于旋转块体集的深埋条形锚板上限分析[J]. 岩土工程学报, 2011, 33(5): 685-692. https://www.cnki.com.cn/Article/CJFDTOTAL-YTGC201105006.htm HUANG Mao-song, YU Sheng-bing. Upper bound analysis of deep strip anchor based on rotational block set[J]. Chinese Journal of Geotechnical Engineering, 2011, 33(5): 685-692. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YTGC201105006.htm
[8] 王立忠, 舒恒. 不排水黏土中深埋锚板的抗拔承载力[J]. 岩土工程学报, 2009, 31(6): 829-836. doi: 10.3321/j.issn:1000-4548.2009.06.003 WANG Li-zhong, SHU Heng. Pullout capacity of deeply embedded plate anchors in undrained clay[J]. Chinese Journal of Geotechnical Engineering, 2009, 31(6): 829-836. (in Chinese) doi: 10.3321/j.issn:1000-4548.2009.06.003
[9] TONG Y M, HAN C C, LIU J. An innovative lightweight gravity installed plate anchor and its keying properties in clay[J]. Applied Ocean Research, 2020, 94: 101974. doi: 10.1016/j.apor.2019.101974
[10] LIU J, LU L H, HU Y X. Keying behavior of gravity installed plate anchor in clay[J]. Ocean Engineering, 2016, 114: 10-24. doi: 10.1016/j.oceaneng.2016.01.018
[11] LIU J, HAN C C, YU L. Experimental investigation of the keying process of OMNI-Max anchor[J]. Marine Georesources & Geotechnology, 2019, 37(3): 349-365.
[12] LIU J, HAN, C C, ZHANG Y Q, et al. An innovative concept of booster for OMNI-Max anchor[J]. Applied Ocean Research, 2018, 76: 184-198. doi: 10.1016/j.apor.2018.05.007
[13] LIU J, HAN C C, MA Y Y, et al. Experimental investigates on hydrodynamic characteristics of gravity installed anchors with a booster[J]. Ocean Engineering, 2018, 158: 38-53. doi: 10.1016/j.oceaneng.2018.03.074
[14] LIU J, MA Y Y, HAN C C. CFD analysis on directional stability and terminal velocity of OMNI-Max anchor with a booster[J]. Ocean Engineering, 2019, 171: 311-323. doi: 10.1016/j.oceaneng.2018.10.053
[15] HAN C C, WANG X, LIU J. A folding-shank gravity installed anchor and its hydrodynamic characteristics in water: physical modelling[J]. Ocean Engineering, 2020, 218: 108213. doi: 10.1016/j.oceaneng.2020.108213
[16] 王煦, 韩聪聪, 刘君. 新型动力安装锚水动力学特性模型试验研究[J]. 海洋工程, 2021, 39(2): 53-61. https://www.cnki.com.cn/Article/CJFDTOTAL-HYGC202102006.htm WANG Xu, HAN Cong-cong, LIU Jun. Experimental investigation on the hydrodynamic characteristics of the light-weight gravity installed plate anchor[J]. The Ocean Engineering, 2021, 39(2): 53-61. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HYGC202102006.htm
[17] 孙兴伟. 新型轻质动力锚沉贯过程模型试验研究[D]. 大连: 大连理工大学, 2019. SUN Xing-wei. Dynamic Installation Process of An Innovative Light-Weight Gravity Installed Plate Anchor: Physical Modelling[D]. Dalian: Dalian University of Technology, 2019. (in Chinese)
[18] 仝玉明. 新型轻质动力锚在c-φ土中安装过程的数值模拟研究[D]. 大连: 大连理工大学, 2020. TONG Yu-ming. Numerical Simulations on the Installation of An Innovative Lightweight Gravity Installed Plate Anchor in c-φ Soil[D]. Dalian: Dalian University of Technology, 2020. (in Chinese)
[19] 卜南乔. 新型轻质动力锚在黏土中沉贯过程的数值模拟研究[D]. 大连: 大连理工大学, 2020. BU Nan-qiao. Numerical Simulation on the Installation Process of An Innovative Light-Weight Gravity Installed Plate Anchor in Clay[D]. Dalian: Dalian University of Technology, 2020. (in Chinese)
[20] HAN C C, LIU J, ZHANG Y Q, et al. An innovative booster for dynamic installation of OMNI-Max anchors in clay: physical modeling[J]. Ocean Engineering, 2019, 171: 345-360. doi: 10.1016/j.oceaneng.2018.10.029
[21] HAN C C, ZHANG Y Q, LIU J, et al. Interpreting strength parameters in soft clays from a new free-fall penetrometer[J]. Computers and Geotechnics, 2021, 135: 104157. doi: 10.1016/j.compgeo.2021.104157
[22] LIU Jun, CHEN Xue-jian, HAN Cong-cong, et al. Estimation of intact undrained shear strength of clay using full-flow penetrometers[J]. Computers and Geotechnics, 2019, 115: 103161. doi: 10.1016/j.compgeo.2019.103161
[23] FINNIE I M S, RANDOLPH M F. Punch-through and liquefaction induced failure of shallow foundations on calcareous sediments[C]//Proceedings of the International Conference on Behavior of Offshore Structures, 1994.
[24] TIAN Y, GAUDIN C, RANDOLPH M F, et al. Influence of padeye offset on bearing capacity of three-dimensional plate anchors[J]. Canadian Geotechnical Journal, 2015, 52: 682-693. doi: 10.1139/cgj-2014-0120
-
期刊类型引用(3)
1. 刘鑫,董广阳,史旦达. 考虑颗粒破碎的砂土中鱼雷锚贯入离散元分析. 水文地质工程地质. 2024(01): 91-101 .  百度学术
百度学术
2. 叶尖峰,韩聪聪,刘君. 组合动力锚水动力特性数值模拟研究. 海洋工程. 2023(01): 39-47 . 百度学术
3. 胡伟,王辉,姚琛,郝冬雪,史旦达. 砂土中水平矩形锚板竖向拉拔承载全域内三维统一力学模型与承载力计算方法研究. 岩土力学. 2023(06): 1811-1825 . 百度学术
其他类型引用(5)








计量
- 文章访问数: 241
- HTML全文浏览量: 20
- PDF下载量: 243
- 被引次数: 8
